Sabit cərəyan, servo və addım mühərrikləri nə ilə fərqlənir?
- Vagif Aliyev
- Dec 29, 2021
- 4 min read
Updated: Oct 15, 2023

Müxtəlif tətbiqlər üçün düzgün mühərrikin seçilməsi bəzi dizayn meyarlarından, məsələn, mövqe dəqiqliyi tələbləri, qiymət, sürücü gücünün mövcudluğu, fırlanma momenti və sürətlənmə tələblərindən asılıdır. Ümumiyyətlə, DC, servo və pilləli mühərriklər kimi mühərriklər müxtəlif tətbiqlər üçün ən yaxşısıdır. Lakin, pilləli motor yüksək tutma anı və daha aşağı sürətlənmə tətbiqləri üçün yaxşı uyğun gəlir. Çoxları DC motor, servo motor və pilləli mühərrik arasında böyük fərq olduğunu başa düşmür. Bu üç mühərrik arasındakı fərqləri bilmək üçün bu məqalə ilə tanış ola bilərsiniz!
DC mühərriki, servo motor və addım mühərriki arasındakı fərq:
DC mühərriki, servo və addım mühərrikləri arasında seçim etmək olduqca çətin bir iş ola bilər, o cümlədən bir çox dizayn amillərinin balanslaşdırılması, yəni qiymət, sürət, fırlanma momenti, sürətlənmə və həmçinin sürücü dövrəsinin hamısı ən yaxşısını seçməkdə mühüm rol oynayır.
DC motorlar - DC Motor iki telli davamlı fırlanan mühərrikdir və iki naqil güc və torpaqdır. Təchizat tətbiq edildikdə, bir DC mühərriki bu güc ayrılana qədər fırlanmağa başlayacaq. DC mühərriklərinin əksəriyyəti dəqiqədə yüksək dövrlərlə (RPM) işləyir, məsələn; soyutma üçün kompüterlərdə istifadə olunan soyutma sistemi və ya radio ilə idarə olunan avtomobil təkərləri.

DC mühərrik sürəti PWM (pulse width modulation) texnikasından istifadə etməklə idarə oluna bilər, gücün ON və OFF-un sürətli impulslanması texnikası. ON/OFF nisbəti ilə velosiped sürmək üçün sərf olunan vaxtın faizi motorun sürətini müəyyən edir. Məsələn, güc 50% idarə olunursa, onda DC mühərriki 100% sürətinin yarısı ilə fırlanacaq. Hər nəbz o qədər sürətlidir ki, mühərrik heç bir ləngimədən dayanmadan fırlanır!
Servo motorlar - Ümumiyyətlə, servo motor dörd hissənin birləşməsidir, yəni bir DC mühərriki, idarəetmə dövrəsi, dişli dəsti və həmçinin potensiometr, adətən mövqe sensoru. Servo motorun vəziyyəti tipik DC mühərriklərindən daha dəqiq idarə oluna bilər və ümumiyyətlə, güc, GND və idarəetmə kimi üç naqil var. Bu mühərriklərə güc davamlı olaraq verilir, servo motorun idarəetmə sxemi servo motoru idarə etmək üçün çəkilişi dəyişdirir. Bu mühərriklər, müəyyən bir diapazonda robot qolu hərəkət etdirmək və ya qayıqda və ya robot ayağında sükanı idarə etmək kimi motor mövqeyinin dəqiq olması lazım olan daha dəqiq vəzifələr üçün nəzərdə tutulub.

Bu mühərriklər standart bir DC mühərriki kimi asanlıqla alternativ deyil. Onun yerində fırlanma bucağı qismən 1800-ə bərabərdir. Servo mühərriklər o/p mövqeyini bildirən idarəetmə siqnalı əldə edir və val mövqe sensoru tərəfindən müəyyən edilən dəqiq mövqeyə keçənə qədər DC motoruna güc tətbiq edir. PWM (pulse width modulation) servo motorun siqnalını idarə etmək üçün istifadə olunur. Lakin, DC mühərriklərindən fərqli olaraq, bu, servo valın sürətdən bir qədər çox mövqeyini idarə edən müsbət impuls dövrüdür. Neytral nəbzin dəyəri servo motorun valını orta vəziyyətdə saxlayan servodan asılıdır. Nəbzin dəyərinin artırılması servo motorun saat yönünün əksinə dönməsinə səbəb olacaq və daha qısa bir nəbz mil saat yönünün əksinə dəyişdirəcəkdir. Servo idarəetmə nəbzi adətən hər 20 ms-dən bir təkrarlanır və bu, oxşar mövqedə qalmaq demək olsa belə, əsas olaraq servo motora hara getməli olduğunu bildirir. Servoya hərəkət etmək əmri verildikdə, xarici qüvvə ona qarşı itələsə belə, o mövqeyə keçəcək və həmin mövqeyi tutacaq. Servo motor bu mövqedən kənara çıxmaqla mübarizə aparacaq, servo motorun istifadə edə biləcəyi maksimum müqavimət qüvvəsi həmin servonun fırlanma momenti dərəcəsidir.
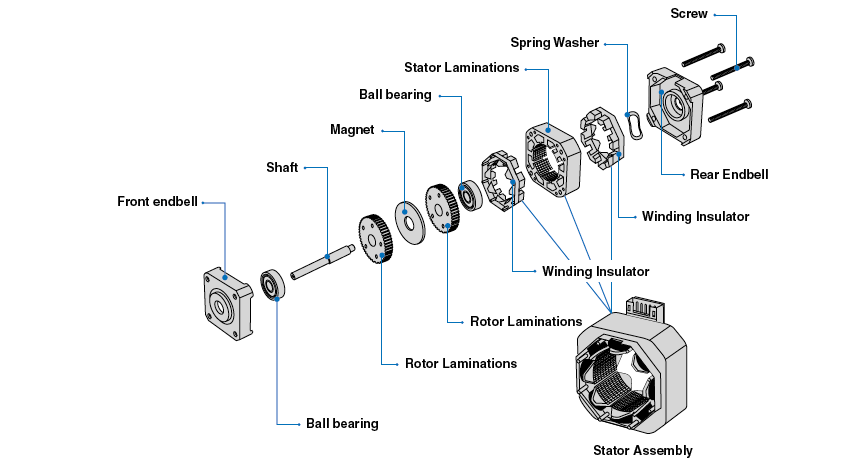
Addım mühərrikləri - Bir pilləli mühərrik əsas etibarilə fərqli bir motorlaşdırma metodundan istifadə edən bir servo motordur. Mühərrikin davamlı fırlanan DC mühərriki və birləşmiş nəzarətçi dövrəsini ehtiva etdiyi hallarda, pilləli mühərriklər mövqeyi təsvir etmək üçün mərkəzi avadanlıq ətrafında yerləşdirilən çoxlu elektromaqnitlərdən istifadə edir. Hər bir elektromaqnitdən ayrı-ayrılıqda enerji vermək və motor valını açıq vəziyyətə gətirmək üçün pilləli mühərrikə xarici idarəetmə sxemi lazımdır. Elektromaqnit güclə idarə edildikdə, avadanlığın dişlərini çəkir və növbəti elektromaqnit "B"dən bir qədər fərqli olaraq onları dəstəkləyir. ''A'' söndürüldükdə və ''B'' açıldıqda, cihaz ''B'' və hər yerdə dairə ilə uyğunlaşmaq üçün bir qədər fırlanır, cihazın ətrafındakı hər bir elektromaqnit növbə ilə enerji verir və fırlanma etmək üçün enerjini kəsir. Bir elektromaqnitdən digərinə hər bir keçid "addım" adlanır və buna görə də motor tam 3600 fırlanma ilə əvvəlcədən müəyyən edilmiş addım bucaqları ilə aktivləşdirilir.
Bu mühərriklər iki növdə istifadə olunur, yəni unipolar və bipolar. Bipolyar mühərriklər ən möhkəm mühərrik növüdür və ümumiyyətlə 4 və ya 8 aparıcıya malikdir. Onların içərisində iki sıra elektromaqnit rulonları var və pilləkənlər rulonlarda cərəyan istiqamətini dəyişdirməklə əldə edilir. Unipolar mühərriklər 5 naqil, 6 naqil və ya hətta 8 naqil olmaqla tanınır, həmçinin 2 sarğı var, lakin hər birinin mərkəzi kranı var. Bu mühərriklər bobinlərdəki cərəyanın əks istiqamətində hərəkət etmədən addım ata bilir və elektronikanı sadələşdirir. Lakin, bu kran bir anda hər rulonun yalnız yarısını gücləndirmək üçün istifadə edildiyi üçün onlar adətən bipolyardan daha az fırlanma momentinə malikdirlər. Addım mühərriklərinin konstruksiyası aktivləşdirilmiş mühərrikə ehtiyac olmadan sabit tutma momenti verə bilər, bu şərtlə ki, mühərrik öz hüdudları daxilində istifadə edilsin, yerləşdirmə xətaları baş verməsin, çünki bu mühərriklər əvvəlcədən müəyyən edilmiş vəziyyətlərə malikdir.
DC, servo və pilləli mühərriklərin müsbət və mənfi cəhətləri:
DC mühərrikləri, əsasən dəqiqədə yüksək fırlanma (RPM) ilə fırlanması lazım olan hər şey üçün istifadə olunan sürətli və davamlı fırlanma mühərrikləridir. Məsələn; avtomobil təkərləri, ventilyatorlar və s.
Servo mühərriklər məhdud bucaq altında yüksək fırlanma momenti, sürətli, dəqiq fırlanmadır. Ümumiyyətlə, pilləli mühərriklərə yüksək performanslı alternativ, lakin PWM tənzimləməsi ilə daha mürəkkəb quraşdırma. Robotik qollar/ayaqlar və ya sükan idarəetməsi və s. üçün uyğundur.
Pilləli motorlar yavaş, asan quraşdırma, dəqiq fırlanma və idarəetmədir. Mövqeyi idarə etməkdə servo mühərriklər kimi digər mühərriklərdən üstünlüyü odur ki, mühərriklər yerləşdirməni idarə etmək üçün əks əlaqə mexanizmi və arxa dövrə tələb etdikdə, bu mühərrik fraksiya əlavələri ilə fırlanma xarakteri ilə mövqe nəzarətinə malikdir. Mövqenin vacib olduğu 3D printerlər və əlaqəli cihazlar üçün uyğundur.



Comments