Что такое EtherCAT: Структура, работа и применение
- Vagif Aliyev
- Dec 4, 2023
- 6 min read

EtherCAT был впервые разработан крупным производителем ПЛК, а именно компанией Beckhoff Automation, и используется в системах управления в реальном времени и промышленной автоматизации. Beckhoff Automation разработала собственную версию Fieldbus, такую как LightBus, в 1980-х годах для решения проблемы пропускной способности других интерфейсов. Дополнительная работа над этим протоколом в конечном итоге привела к изобретению EtherCAT. Компания Beckhoff запустила протокол EtherCAT в 2003 году по всему миру. После этого, в 2004 году, они передали права на EtherCAT Technology Group (ETG). ETG имеет чрезвычайно активную группу разработчиков и пользователей.
Что такое EtherCAT?
EtherCAT или Ethernet Control Automation Technology - это промышленная сетевая система, которая зависит от системы Ethernet, используемой для достижения очень быстрых и более совершенных коммуникаций. Таким образом, EtherCAT - это очень быстрая сеть, используемая для обработки данных с помощью специализированного оборудования и программного обеспечения. В этой сети используется конфигурация "ведущий-ведомый" (master-slave), полный дуплекс с любой топологией сети.
Время обработки 1000 точек ввода/вывода составляет 30 секунд, а обмен данными со 100 сервоосями происходит в течение 100 секунд. Сервооси будут получать заданные значения для данных управления и сообщать о фактическом состоянии. Эти оси синхронизируются с помощью метода распределенных часов, который представляет собой простую версию IEEE 1588 и уменьшает джиттер до менее чем 1 us. EtherCAT обеспечивает быстрый вывод данных, поскольку сообщения обрабатываются внутри аппаратного обеспечения, прежде чем они будут переданы следующему ведомому устройству.
Структура EtherCAT:
Ниже показана архитектура сети EtherCAT, которая использует принцип "ведущий/ведомый" для управления доступом к среде. В этой структуре ведущим устройством EtherCAT обычно является система управления, которая использует типичный порт Ethernet, а также хранящуюся информацию о конфигурации сети в файле ENI (EtherCAT Network Information).

Файл EtherCAT Network Information просто создается на основе файлов ESI (EtherCAT SlaveInformation), которые предоставляются продавцами для каждого устройства. Здесь ведущий узел передает кадры ведомым узлам, которые могут вставлять и удалять данные из этих кадров. Ведомые устройства - это узлы, такие как приводы EPOS3, которые содержат порты Ethernet для связи через EtherCAT-ведущий. Здесь EtherCAT-ведущий - это компьютерное устройство, используемое для поддержания обмена данными между ведущим и различными ведомыми узлами.
Как работает EtherCAT?
EtherCAT используется для преодоления типичных недостатков Industrial Ethernet благодаря высокопроизводительному режиму работы, в котором обычно достаточно одного кадра для передачи и приема управляющих данных от и ко всем узлам. Протокол EtherCAT построен на физическом уровне Ethernet, однако EtherCAT использует подход обработки на ленту для транспортировки и маршрутизации сообщений, который также называют коммуникацией на лету, вместо использования TCP/IP. Конфигурации ведущего и ведомого устройств EtherCAT показаны ниже. В этой конфигурации ведущий Ethercat передает пакет данных (телеграмму) каждому ведомому, который также называется узлом. Главная особенность EtherCAT заключается в том, что ведомые устройства в вышеуказанной конфигурации могут считывать или извлекать из телеграммы только необходимые данные и добавлять информацию в телеграмму до того, как она перейдет во второй узел или ведомое устройство. Таким образом, телеграмма проходит через все подключенные ведомые устройства и после этого возвращается к ведущему устройству.

Протокол EtherCAT отправляет телеграмму от ведущего устройства ко всем ведомым устройствам, подключенным в сети. Каждый ведомый в сети может просто считывать данные, относящиеся к этому ведомому, и добавлять данные в телеграмму до того, как она перейдет ко второму узлу. Чтение и запись данных просто включаются через специальный ASIC на каждом ведомом EtherCAT. При таком подходе каждый ведомый вносит минимальную задержку в процедуру, и коллизии невозможны. Протокол EtherCAT просто обеспечивает связь в реальном времени и детерминированный обмен данными, совместимый с синхронизированным и многоосевым управлением движением без необходимости использования дополнительного оборудования для достижения синхронизации между несколькими осями.
Устойчивость к сбоям:
В конфигурации EtherCAT "ведущий и ведомый", если выход последнего узла не связан с ведущим, то данные автоматически возвращаются в другом направлении по протоколу EtherCAT. Таким образом, временная метка сохраняется.
Каждый узел в приведенной выше конфигурации маркирует данные по времени, как только они получены, а затем снова маркирует, когда передает их на второй узел. Таким образом, всякий раз, когда мастер получает данные от разных узлов, он легко определяет задержку каждого узла. Передача данных от ведущего устройства получает временную метку ввода-вывода от каждого узла, что делает EtherCAT более детерминированным и точным.

Отказоустойчивость означает, что сети EtherCAT не обязательно должны быть соединены в кольцевую сеть, как показано на приведенной выше схеме, однако они могут быть соединены различными способами, такими как топология дерева, топология линии, топология кольца, топология звезды, а также с помощью комбинаций.
Конечно, между ведомыми устройствами и ведущим должна быть полоса подключения. Если их отключить, то они не смогут работать, хотя топология сети очень гибкая и отлично переносит ошибки. В системах EtherCAT нет необходимости в коммутаторах, как в Ethernet. Длина кабеля между узлами может достигать 100 метров. Низковольтная дифференциальная сигнализация на медных витых парах работает на максимальных скоростях при очень низком энергопотреблении. Поэтому для повышения скорости и обеспечения гальванической развязки между устройствами можно использовать волоконно-оптические кабели (ВОК). EtherCAT использует Ethernet-кабель, который может быть протяженностью до 100 м между двумя узлами. Кроме того, протокол позволяет передавать данные и питание по одному кабелю. Такой тип соединения используется для подключения различных устройств, например датчиков, к одной линии. Если расстояние между узлами превышает 100 м, то используется волоконно-оптический кабель типа 100BASE-FX. Для EtherCAT также доступен полный ассортимент кабелей Ethernet.
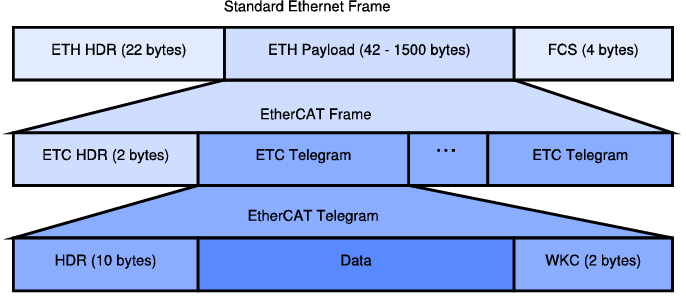
Каркас EtherCAT:
Протокол EtherCAT использует типичный кадр Ethernet, который включает в себя минимум одну или более дейтаграмм. В этом кадре в заголовке дейтаграммы будет указано, какой тип входа хочет выполнить ведущее устройство:
Чтение, запись, чтение-запись.
Право доступа к определенному ведомому устройству через прямую адресацию или право доступа к различным ведомым устройствам через логическую адресацию.
Логическая адресация используется для процесса циклического обмена данными, где каждая датаграмма адресует точную часть образа процесса в пределах сегмента протокола EtherCAT.
Каждому ведомому устройству выделяется один или несколько адресов в этом глобальном адресном пространстве в рамках всей созданной сети. Одна датаграмма может рассматриваться, если нескольким ведомым устройствам выделены адреса в схожей области. В EtherCAT датаграммы содержат информацию, связанную с доступом к данным, таким образом, ведущее устройство принимает решение о том, когда обращаться к данным. В настоящее время безопасность является одной из основных характеристик даже в области автоматизации как передачи данных, так и коммуникации. Так, EtherCAT использует протокол Safety для обеспечения безопасности, позволяя создать единственную систему связи, обеспечивающую безопасность и контроль данных. Эта функция безопасности также гибко изменяет данные, расширяет архитектуру системы безопасности и т.д. Технология безопасности протокола EtherCAT сертифицирована TÜV и была разработана на основе IEC 61508 и идентична IEC 61784-3. Этот протокол применим в системах безопасности с уровнем целостности безопасности, равным SIL 3.
Различия между EtherCAT и Ethernet ;
EtherCAT:
EtherCAT - это система Fieldbus, основанная на Ethernet.
Она применима как для мягких, так и для жестких вычислений в реальном времени в рамках технологии автоматизации.
Международный стандарт Ethercat - IEC 61158.
Он требует работы в режиме "ведущий/ведомый".
Для этого необходима кольцевая топология.
Он оптимизирован специально для управления в режиме реального времени.
Он оптимизирован таким образом, чтобы избежать столкновений данных.
Ethernet:
Ethernet - это технология проводных компьютерных сетей.
Он применим в локальных и глобальных сетях, а также в сетях MAN и WAN.
Международный стандарт Ethernet - IEEE-802.3.
Он не требует работы в режиме "ведущий/ведомый".
Ему не нужна топология на базе кольца.
Он не оптимизирован для управления в режиме реального времени.
Он не оптимизирован для предотвращения столкновений данных.
Различия между EtherCAT и Profinet.;
EtherCAT:
EtherCAT - это один из типов протоколов, используемых для обеспечения гибкости и мощности Ethernet в системах промышленной автоматизации, системах управления в реальном времени, системах управления движением и сбора данных.
EtherCAT обеспечивает открытое решение по очень низкой цене по сравнению с PROFINET IRT и SERCOS III.
Время отклика составляет 0,1 мс.
Джиттер Ethercat составляет <0,1 мс.
Profinet:
Profinet - это коммуникационный протокол, используемый для обмена данными между контроллерами и устройствами.
Profinet не предоставляет открытого решения по очень низкой цене.
Время отклика составляет < 1 мс.
Джиттер Profinet составляет <1 мс.
Различия между EtherCAT и CANopen;
EtherCAT:
Скорость шины в Ethercat составляет 100 Мб/с.
Режим передачи данных, используемый в Ethercat, - полнодуплексный.
Детерминизм или джиттер между устройствами составляет всего 1 нс.
Один ведущий используется с одним или несколькими ведомыми.
Максимальное расстояние между устройствами - 100 метров.
В качестве дополнительного коммуникационного порта используется USB.
CANopen:
Скорость шины в CANopen составляет 1 Мбит/с.
Режим передачи данных, используемый в CANopen - полудуплексный.
Детерминизм или джиттер между устройствами обычно составляет от 100 до 200 нс.
Single/multi-master используется с одним или несколькими ведомыми.
Максимальное расстояние между устройствами в основном зависит от скорости шины.
В качестве дополнительного порта связи используется RS232.
Различия между EtherCAT и Modbus;
EtherCAT:
EtherCAT - это система полевой шины, основанная на Ethernet.
В нем используется принцип обработки "на лету".
EtherCAT основан на модели ведущего и ведомого устройства.
Он поддерживает практически все сетевые топологии.
Ethercat детерминирован.
Modbus:
Modbus - это протокол последовательной передачи данных.
Он использует символьные последовательные линии связи.
Modbus основан на модели запрос-ответ.
Он поддерживает только топологии "линия" и "звезда".
Modbus не является детерминированным, поскольку основан на TCP.
Преимущества:
EtherCAT - это выдающаяся полевая шина, используемая в приложениях управления движением.
Она проверена для оптимизации производительности оборудования благодаря гибкой топологии, детерминированной производительности и различным функциям.
Она поддерживает все семейство CANopen и профиль привода Sercos.
Резервирование также возможно при использовании кольцевой топологии. EtherCAT также использует топологию "звезда", "дерево", "линия" и "шина".
Этот протокол обеспечивает высокую скорость, меньший трафик данных, меньшую стоимость оборудования, а также большую точность и механизм синхронизации часов по сравнению с Ethernet.
Скорость сети также можно регулировать, поскольку компьютеры могут испытывать трудности с обработкой большего количества циклов, поэтому оптимизация в EtherCAT вполне достижима.
Он поддерживает практически все топологии, поэтому может использоваться в широком спектре приложений с типичным коммутатором на основе топологии Ethernet "звезда".
Протоколы Ethernet очень безопасны, используют упрощенные мастера, пространство для данных больше, а обработка происходит "на лету".
Недостатки:
Основным недостатком EtherCAT является то, что ведомые устройства требуют установки специального аппаратного обеспечения ASIC для работы с EtherCAT. Модель данных EtherCAT сильно отличается и очень сложна для понимания.
Области применения:
EtherCAT применяется в различных областях благодаря таким характеристикам, как отличная производительность, простота, надежность, доступность, интегрированная безопасность и гибкая топология. Он используется в таких областях, как станки, робототехника, печатные машины, прессы, электростанции, подстанции, испытательные стенды, сварочные аппараты, сельскохозяйственная техника, краны и подъемники, ветряные турбины, фрезерные станки, подъемно-транспортные машины, упаковочные машины, измерительные системы, металлургические предприятия, бумажные и целлюлозные машины, системы управления сценой, системы управления туннелями и т.д.
Применяется для измерения оборудования, медицинских приборов, управления машинами, мобильными машинами, многочисленными встроенными системами и автомобилями.
Обладает чрезвычайно высокой производительностью, прост в установке и является открытым протоколом на основе прикладного уровня, используемым в приложениях Ethernet.
Это открытая коммуникационная система реального времени, широко используемая в автоматизированном производстве.



Comments